CMU Biorobotics Lab · 2024
MMPUG.
GUI tools for autonomous search and rescue robot fleets.
Data visualization GUI and live video feedback system for a fleet of autonomous search and rescue robots operating in GPS-denied, communication-degraded environments.
Robot Exploration Researcher · Jan 2024

problem
No structured way to review and replay.
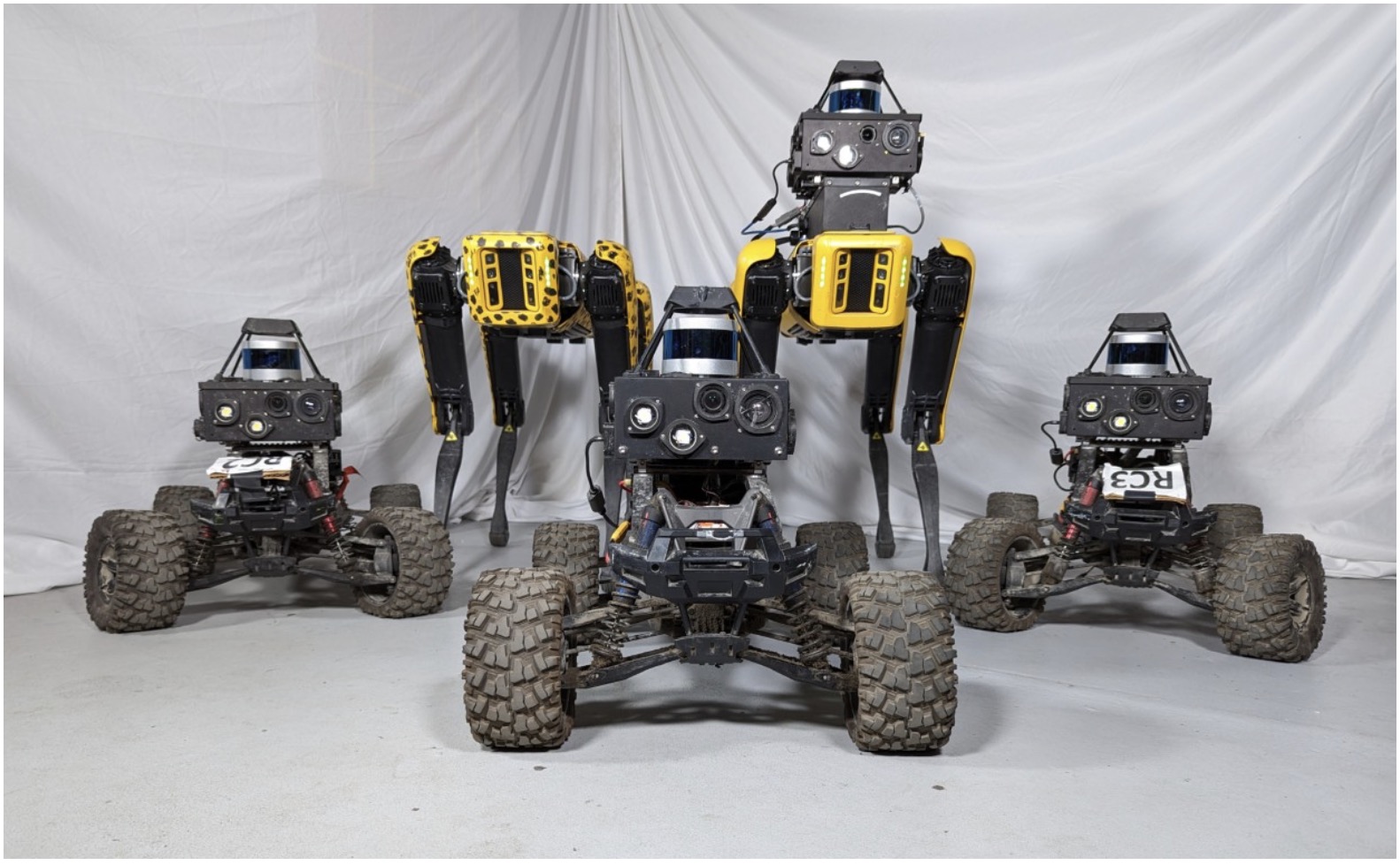
The CMU Biorobotics Lab operates a heterogeneous fleet of autonomous robots, wheeled and legged, designed to explore unknown structures and locate survivors in search and rescue scenarios. The core challenge was not the robots. It was the researchers validating them. LiDAR datasets across an entire fleet had no structured way to be reviewed, replayed, or verified. Synchronizing maps across multiple robots before a mission required 4 minutes of manual calibration per session. There was no way to rewind and inspect what a robot had seen 30 seconds ago.
contributions
Two GUI tools for data validation and operator control.
A data visualization interface allowing researchers to rewind and replay LiDAR camera feeds across the full robot fleet. Established 10 robustness criteria validated across 10,000 scans. The replay feature, accessible directly from the control panel, allows operators to scrub back 30 seconds of footage from any robot during or after a mission, enabling rapid identification of dataset anomalies without re-running full sessions.
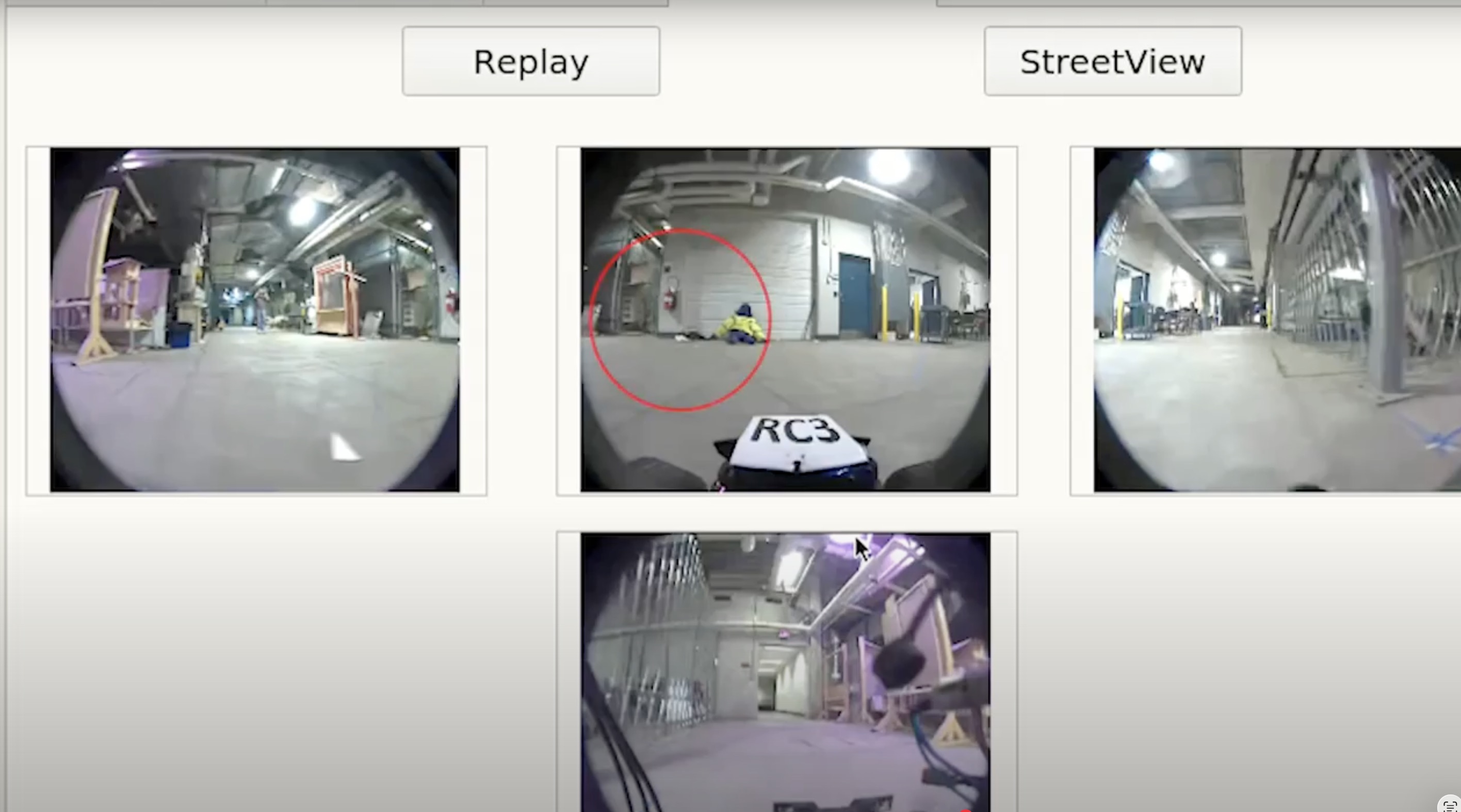
Multi-camera replay grid: RC3 fisheye feeds across three simultaneous viewpoints, victim circled in center frame.
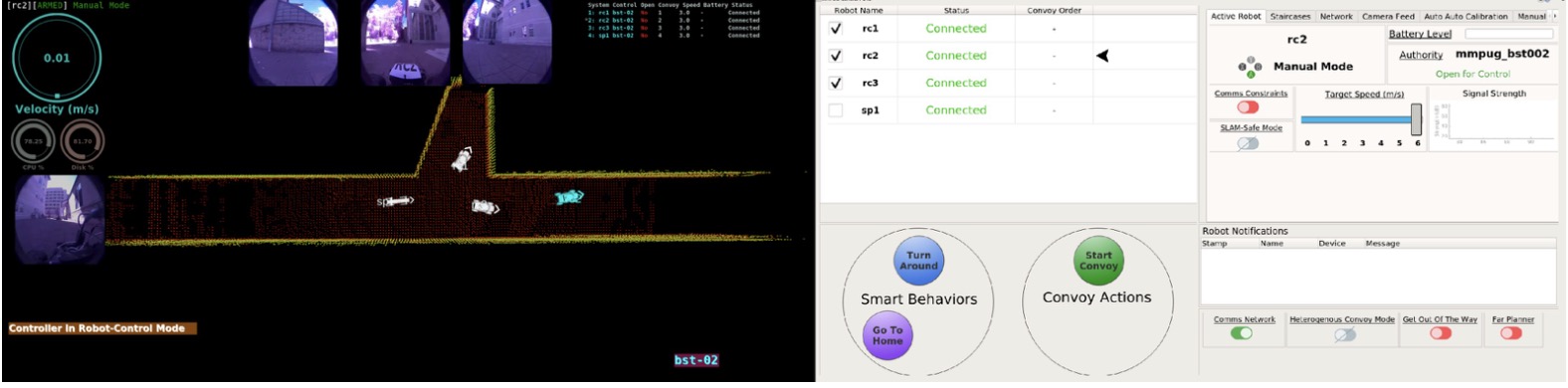
Mode switching interface for the operator control panel, handling transitions between Manual, Joystick, Waypoint, and Exploration autonomy modes. The GUI updates dynamically based on robot behavior tree feedback, surfacing only valid actions at each state. Battery level, signal strength, SLAM-safe mode, comms constraints, and target speed are all surfaced in a single persistent panel per robot.
system · MMPUG
Sliding-mode autonomy across four control levels.
The broader MMPUG system operates on a principle of sliding-mode autonomy: operators can blend human control with machine precision at any point in a mission. Four levels: Full Manual for direct teleoperation, Smart Joystick for assisted navigation around obstacles, Waypoint Mode for autonomous path planning to a goal, and Exploration Mode for fully autonomous unknown-area mapping. The GUI contributions sit at the operator layer, making this control hierarchy accessible and error-resistant in high-stress field conditions.
The system also supports heterogeneous convoy operations. A wheeled robot maps a staircase, shares the location across the network, and a legged Spot robot is tasked to navigate there autonomously. Communication-degraded environments are handled via a peel-off maneuver, where trailing robots stop and act as static relay nodes to extend network range.
Full Manual
Direct teleoperation by operator.
Smart Joystick
Assisted navigation around obstacles.
Waypoint Mode
Autonomous path planning to a goal.
Exploration Mode
Fully autonomous unknown-area mapping.
outcome
Full autonomy hierarchy, accessible in the field.
The control panel GUI made the full autonomy hierarchy accessible in high-stress field conditions, with state-aware controls and persistent per-robot status panels.